Perception and Manipulation
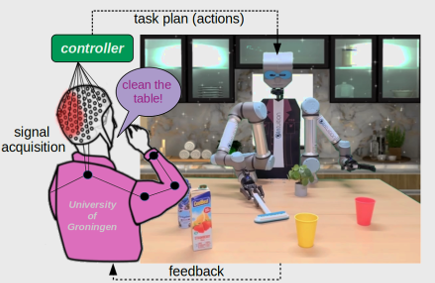
 The Interactive Robot Learning Laboratory (IRL-Lab) focuses on fundamental lifelong robot learning to
make robots capable of learning in an open-ended fashion by interacting with non-expert users.
In our research, apart from robot self-learning, non-expert human users could
interactively guide the process of experience acquisition by teaching new concepts, or by correcting
insufficient or erroneous concepts. This way, the robot will constantly learn how to operate effectively
in complex environments, adapt to user preferences, and learn from user input without the need for re-programming.
The Interactive Robot Learning Laboratory (IRL-Lab) focuses on fundamental lifelong robot learning to
make robots capable of learning in an open-ended fashion by interacting with non-expert users.
In our research, apart from robot self-learning, non-expert human users could
interactively guide the process of experience acquisition by teaching new concepts, or by correcting
insufficient or erroneous concepts. This way, the robot will constantly learn how to operate effectively
in complex environments, adapt to user preferences, and learn from user input without the need for re-programming.
We also work on challenging open problems at the intersection of robotics, computer vision, and machine learning. We develop algorithms and systems to understand the underlying principles of robust sensorimotor coordination in humans and animals with the aim of improving the skills and autonomy of complex robotic systems.
We are always looking out for talented members to join our group. Please see our current openings at the Open Positions page.
Perception and Manipulation

Dual-arm Manipulation
Neural Motion/Task Planning
In our group, we focus on Lifelong Interactive Robot Learning to make robots capable of learning in an open-ended fashion by interacting with non-expert human users. In particular, we have been developing this goal over the following six specific research directions. Details of our publications, including paper, demonstration, and code, can be found here!
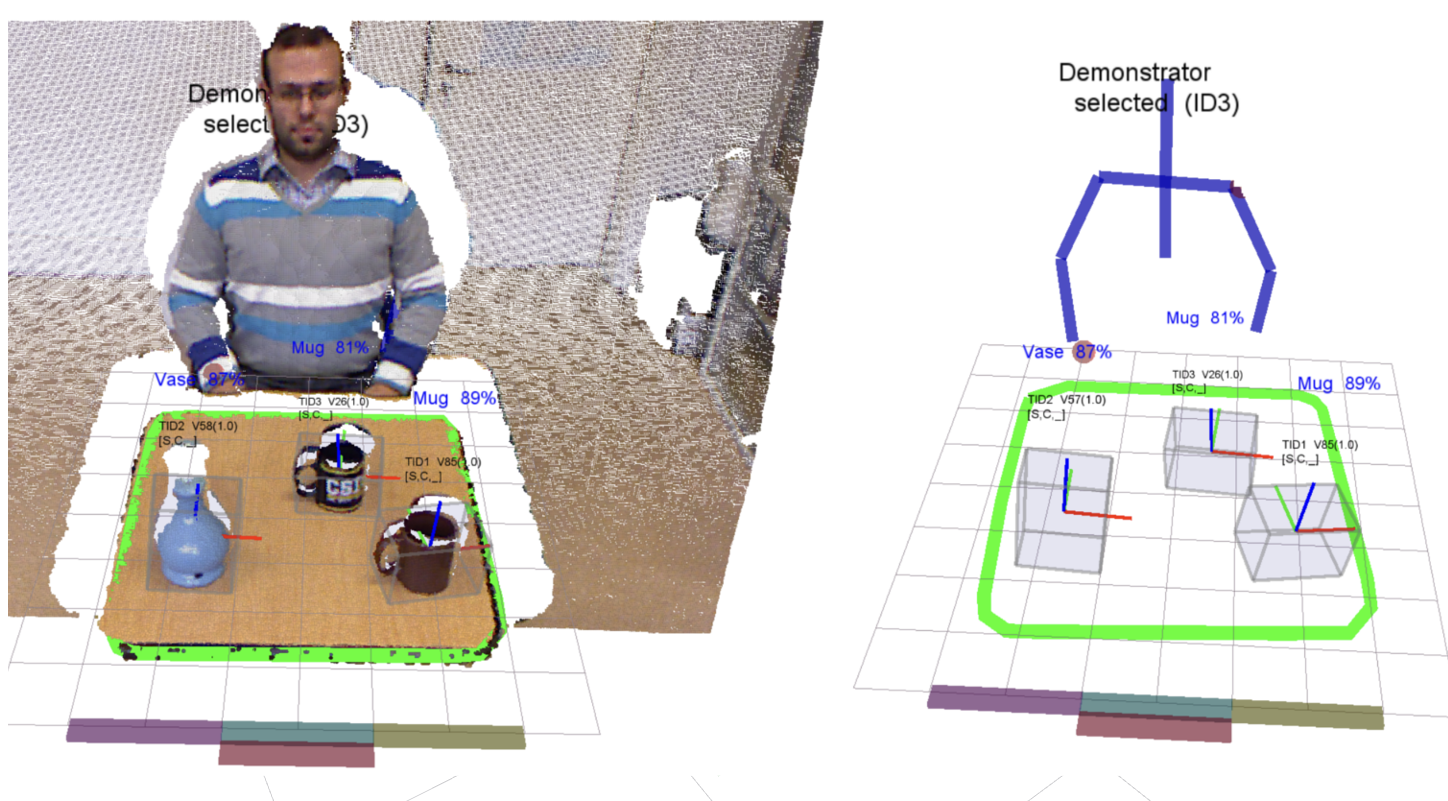
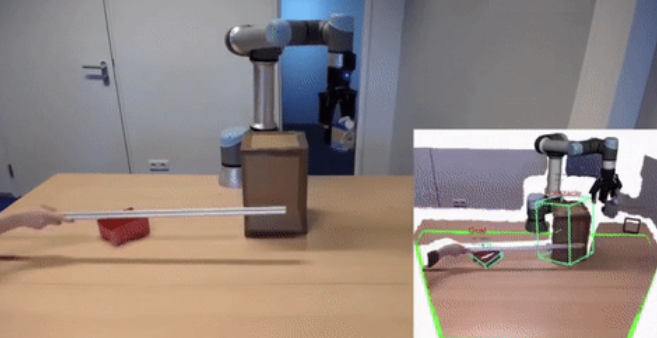
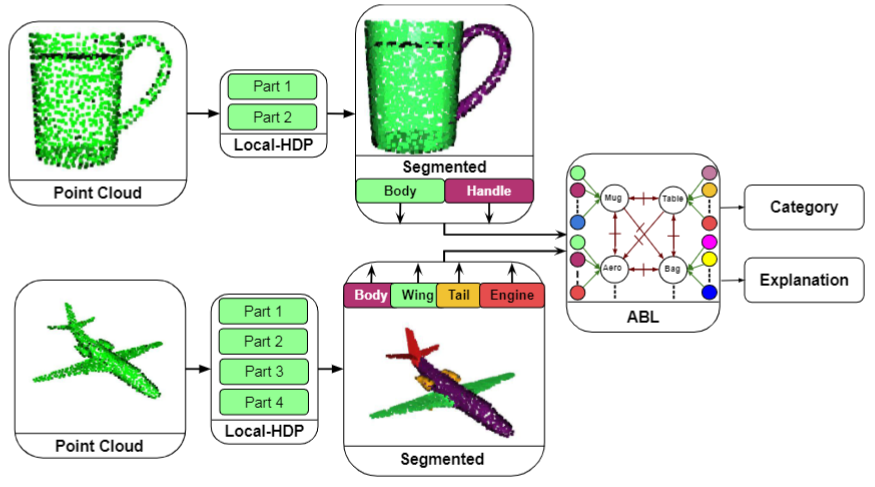
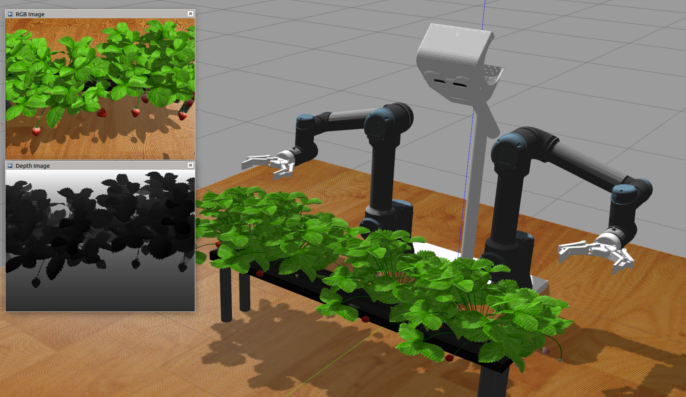
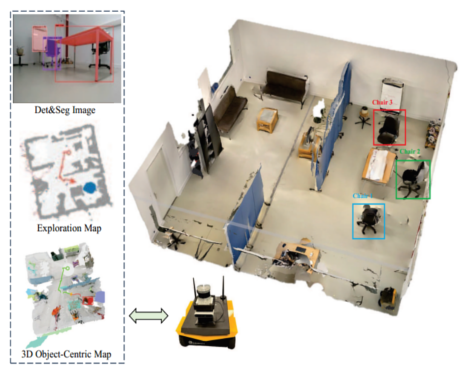
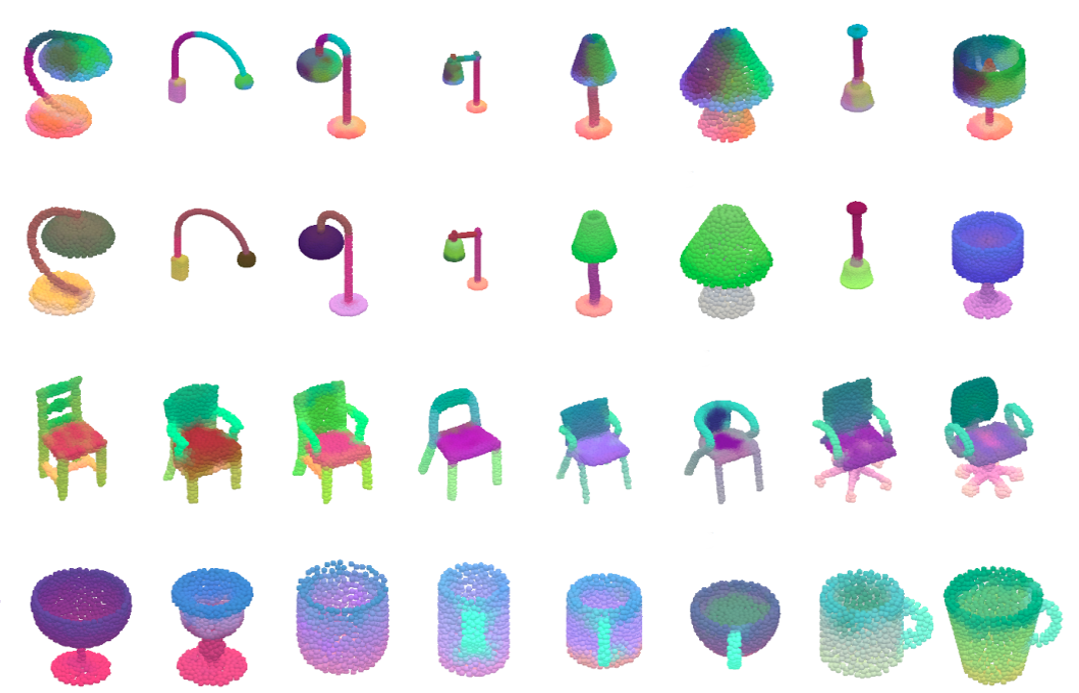
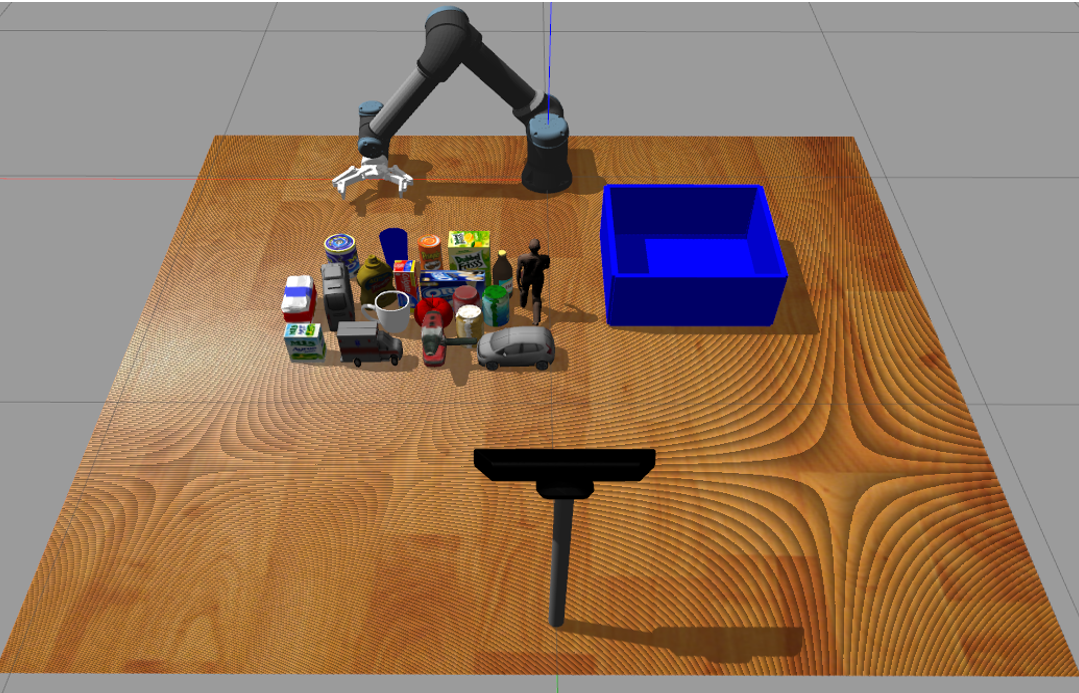
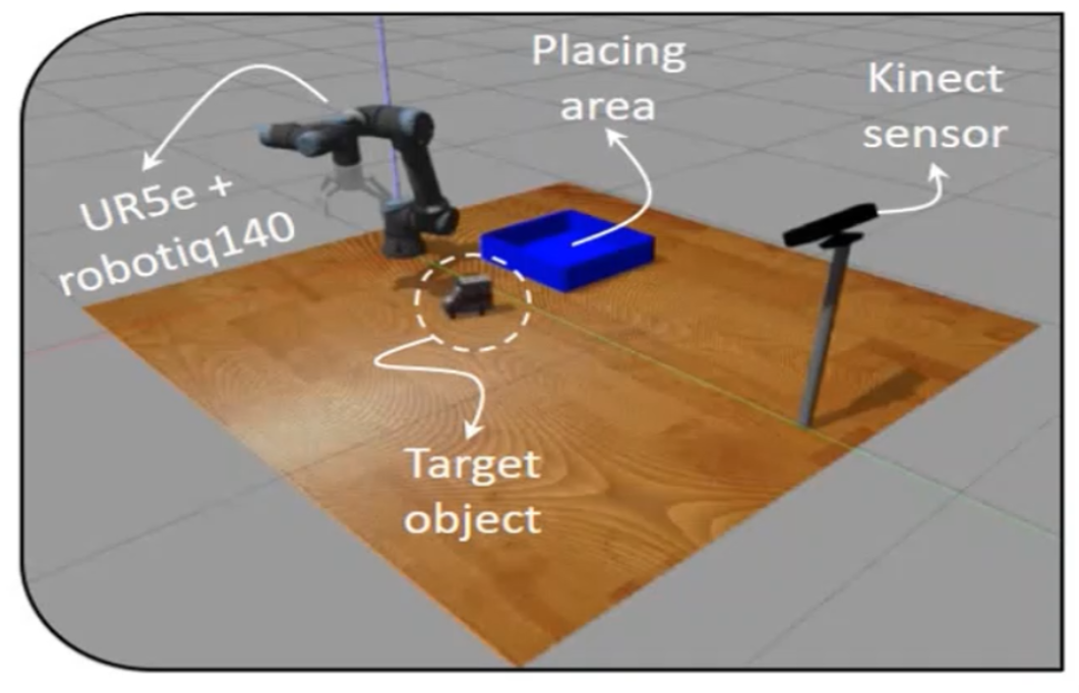
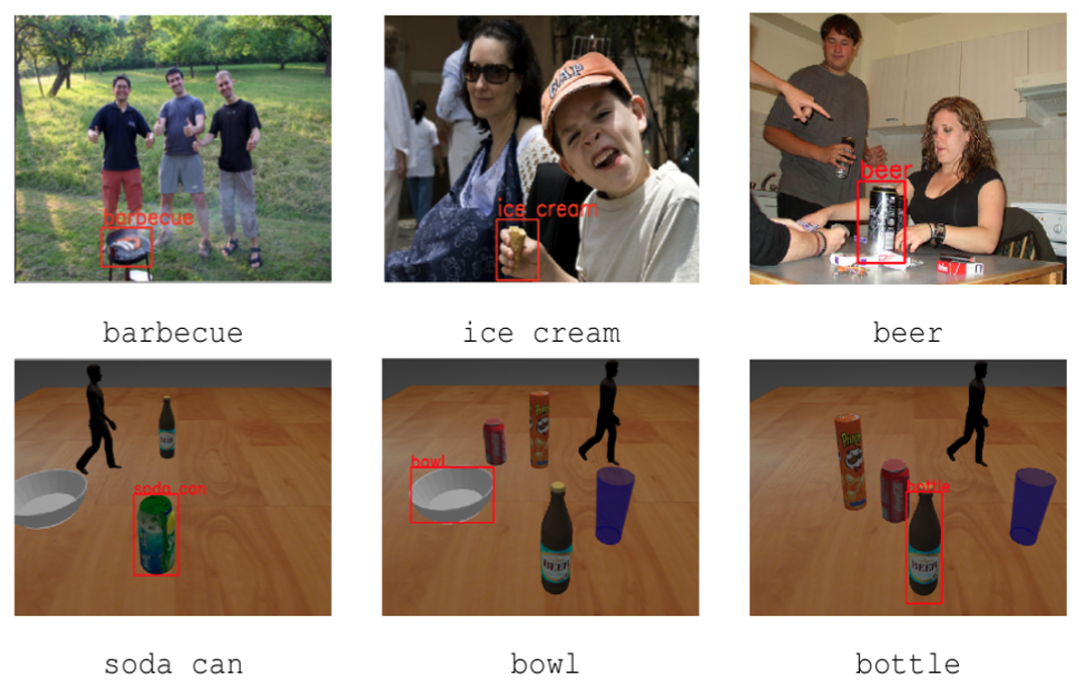
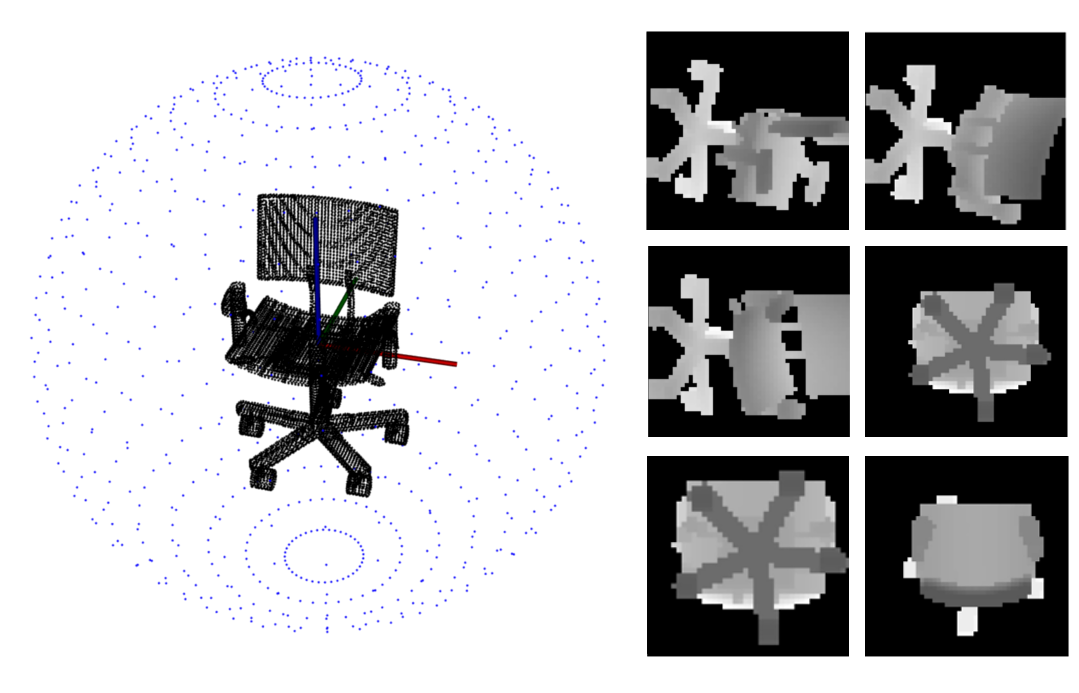
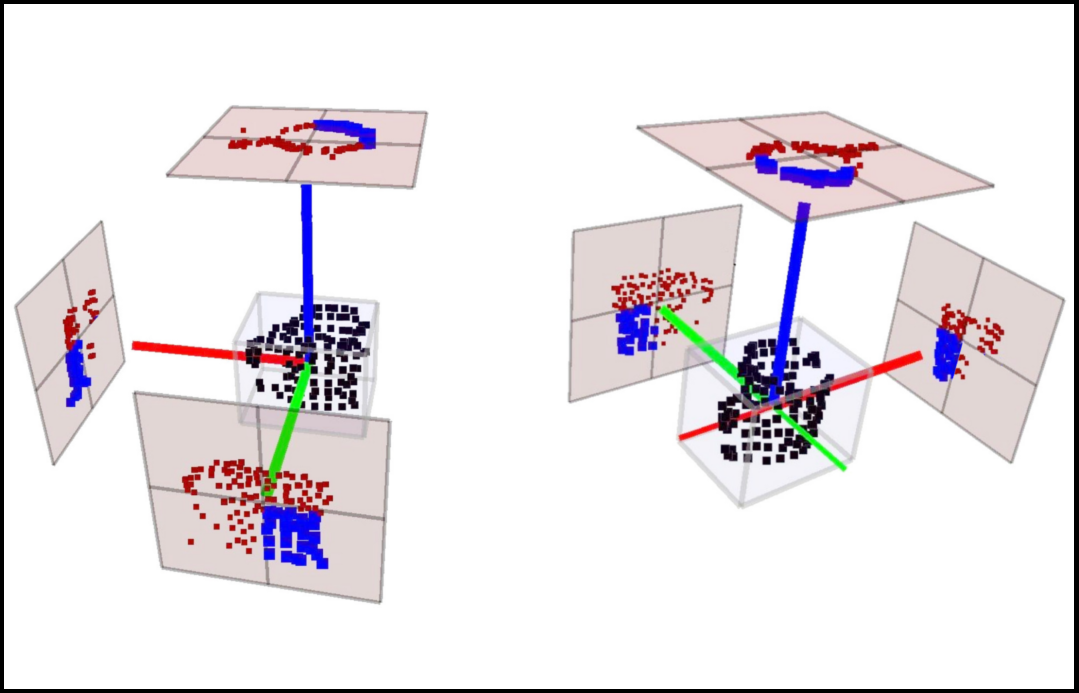
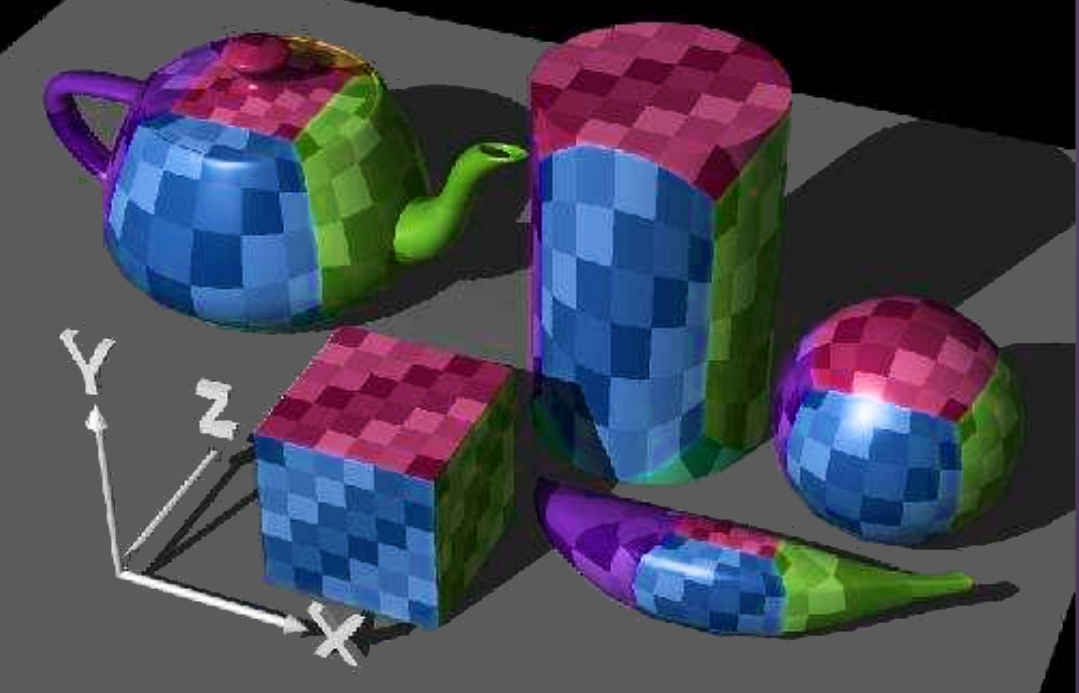
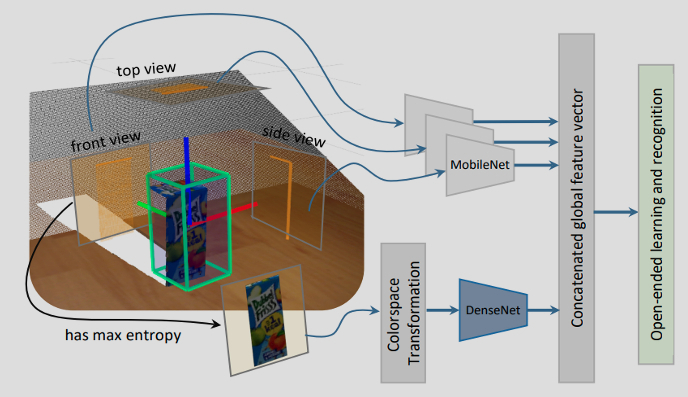
We are interested in attaining a 3D understanding of the world around us. In particular, the perception system provides important information that the robot has to use for interacting with users and environments.
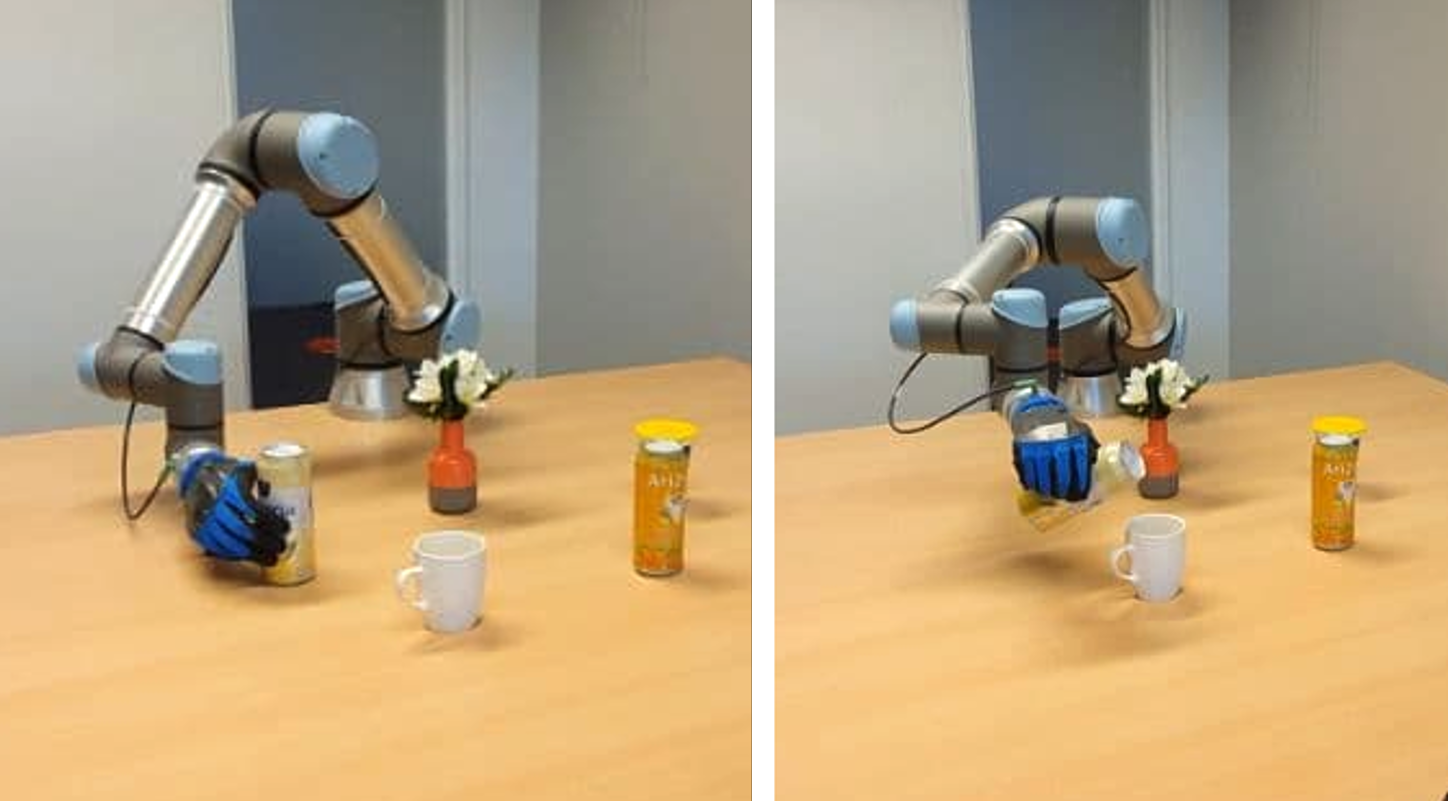
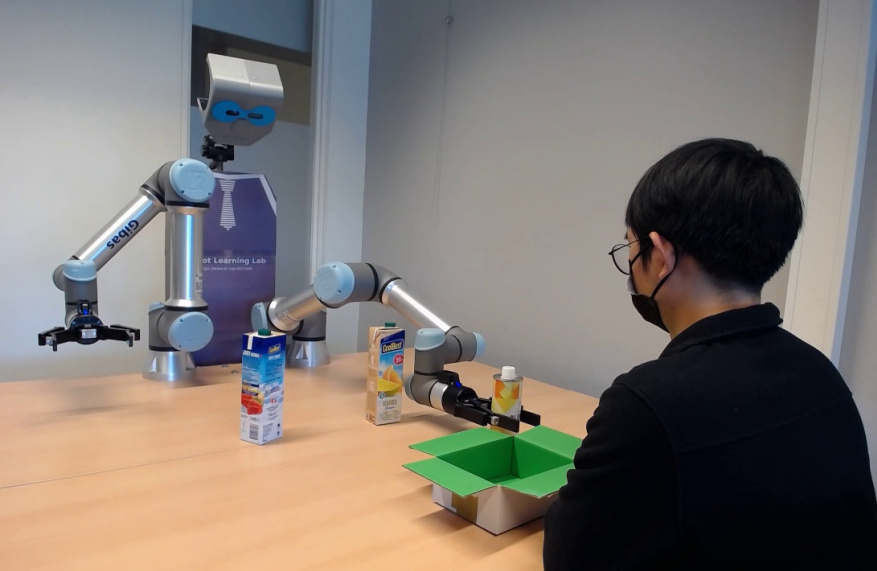
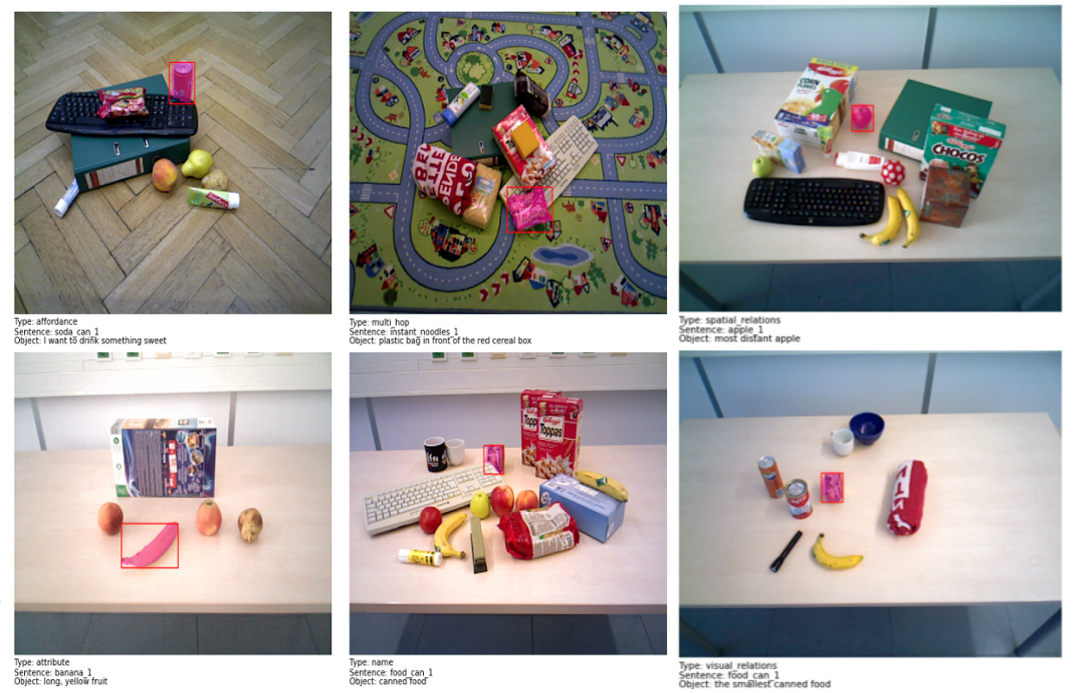
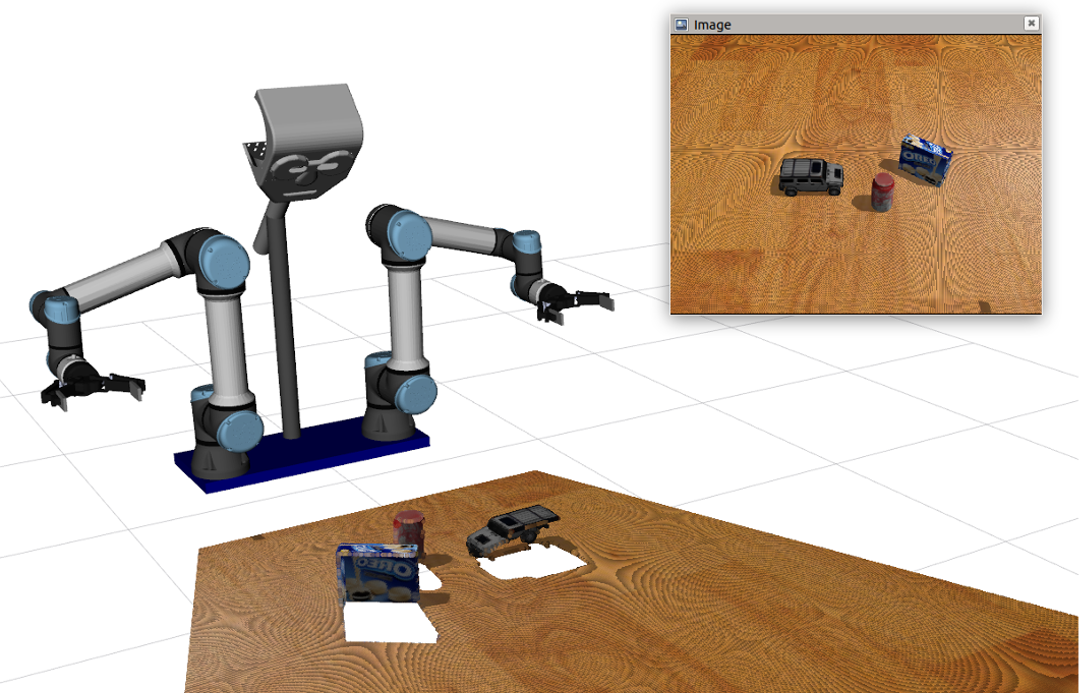
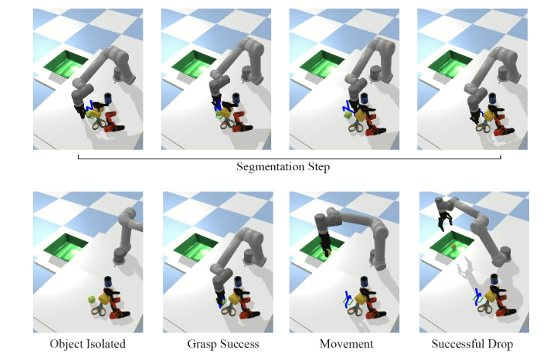
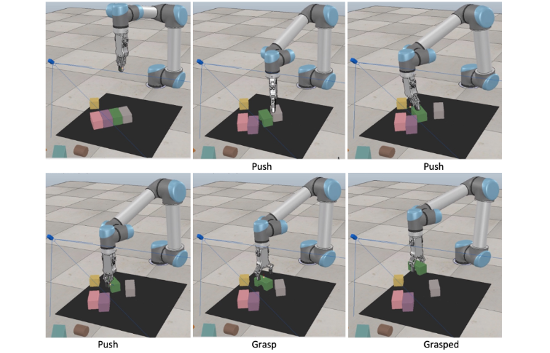
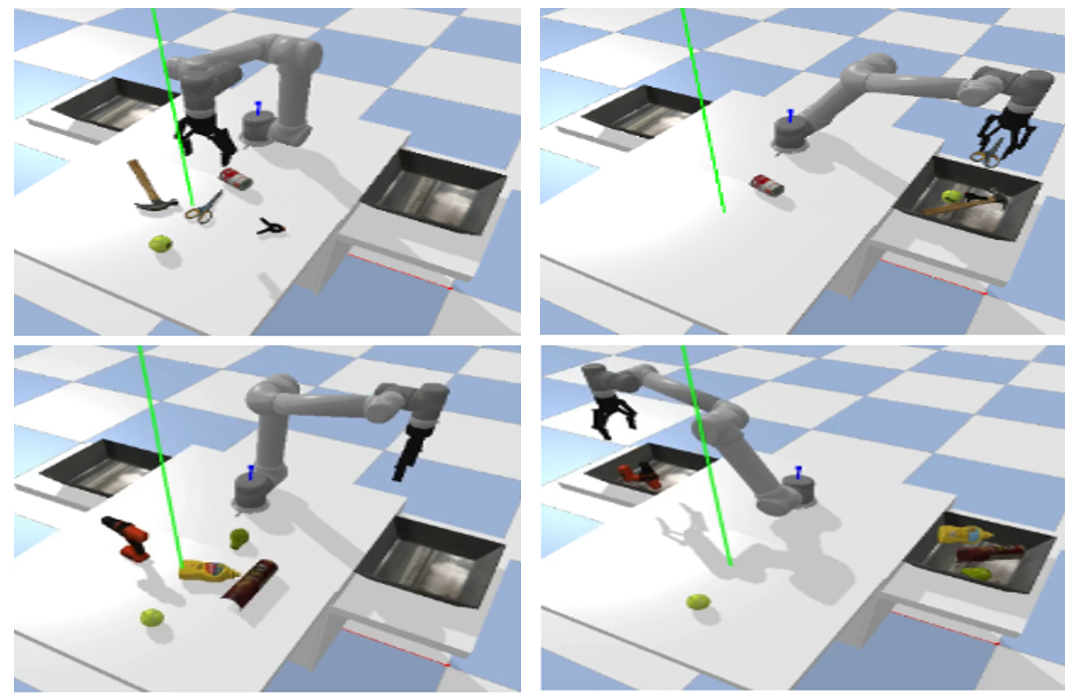
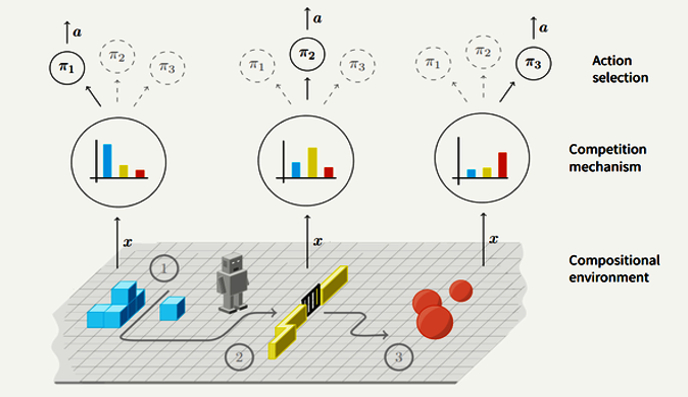
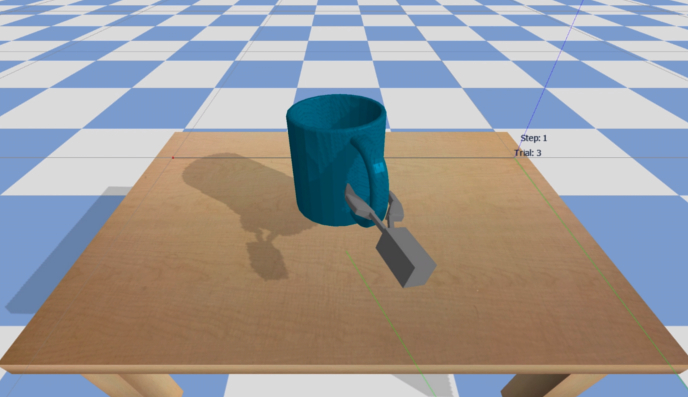
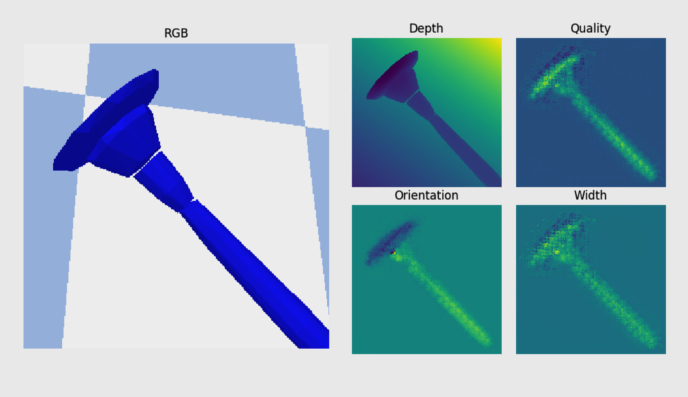
A service robot must be able to interact with the environment as well as human users. We are interested in fundamental research in object-agnostic grasping, affordance detection, task-informed grasping, and object manipulation.
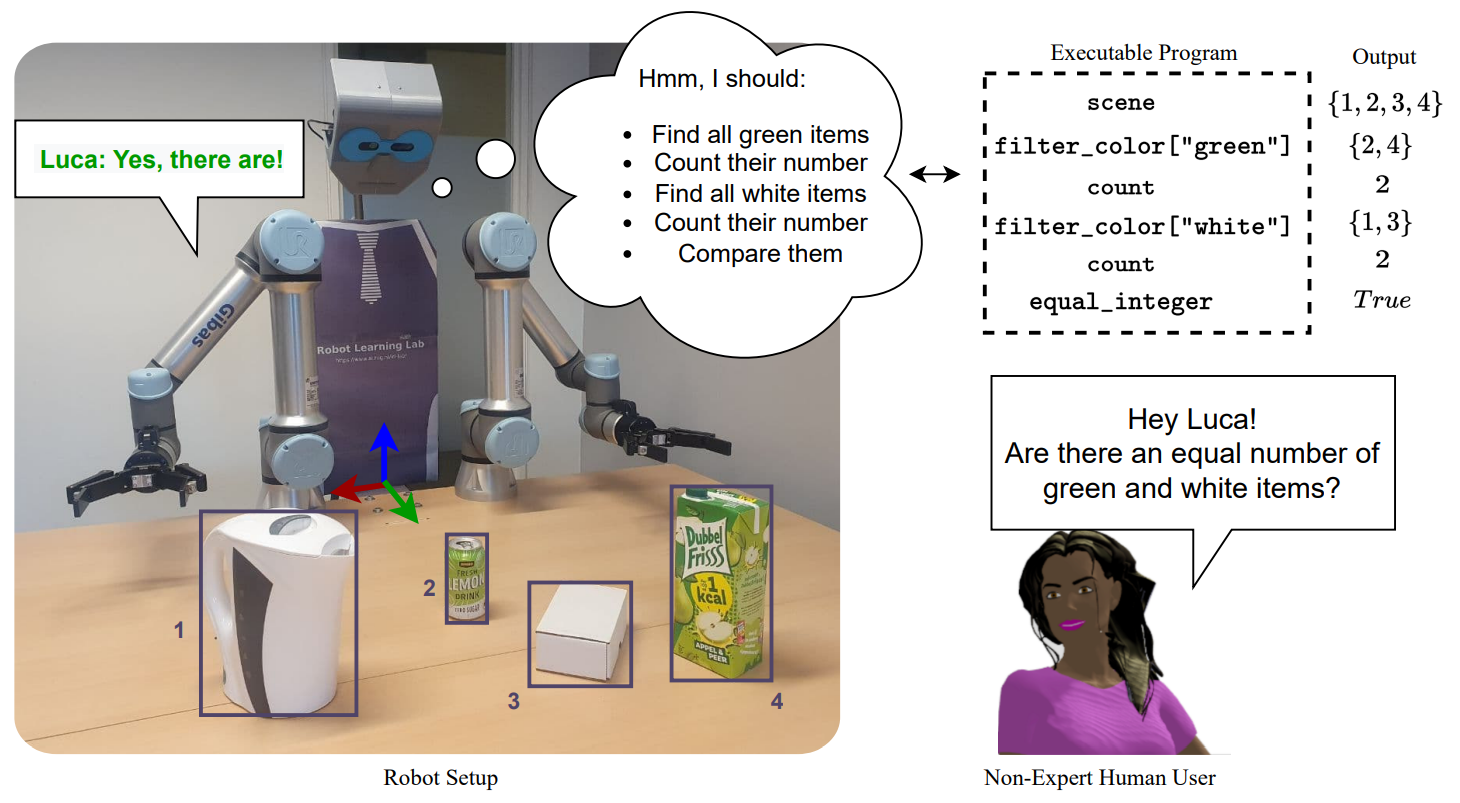
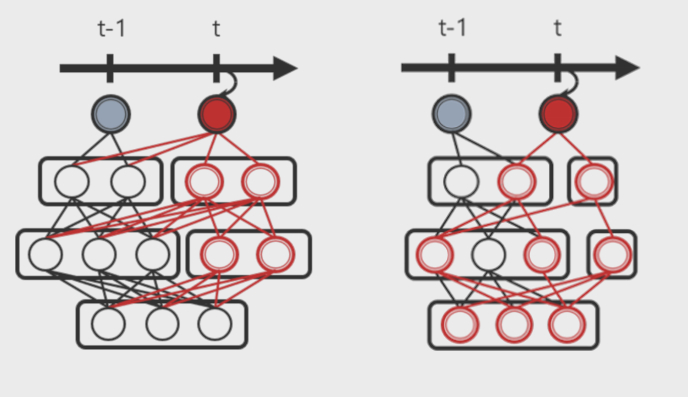
No matter how extensive the training data used for batch learning, a robot will always face new tasks. Therefore, the robot should be able to continually learn about new tasks from few training examples on-site by interacting with non-expert users.
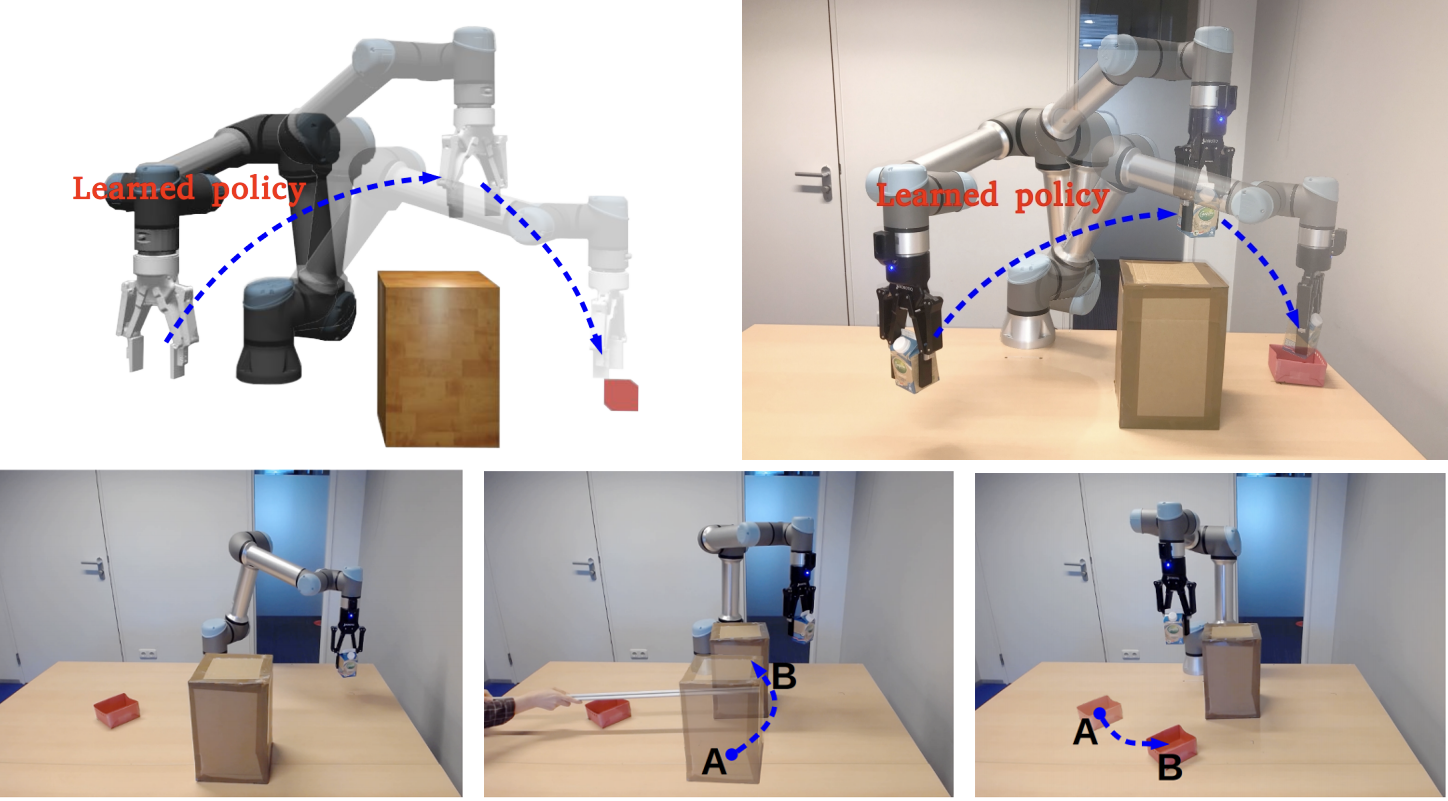
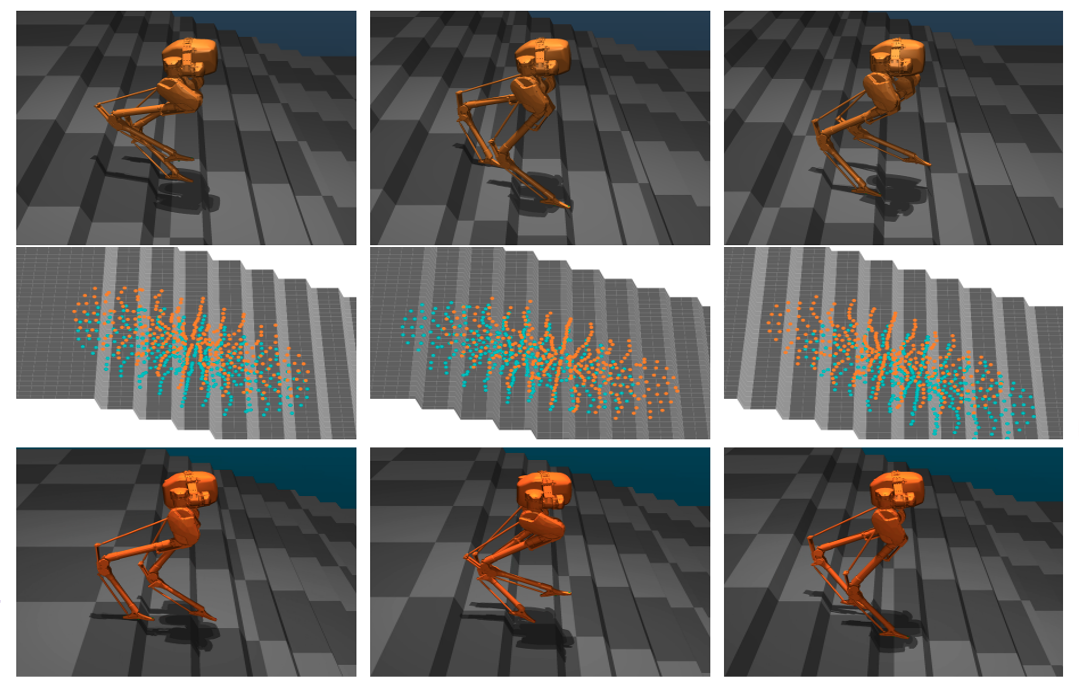
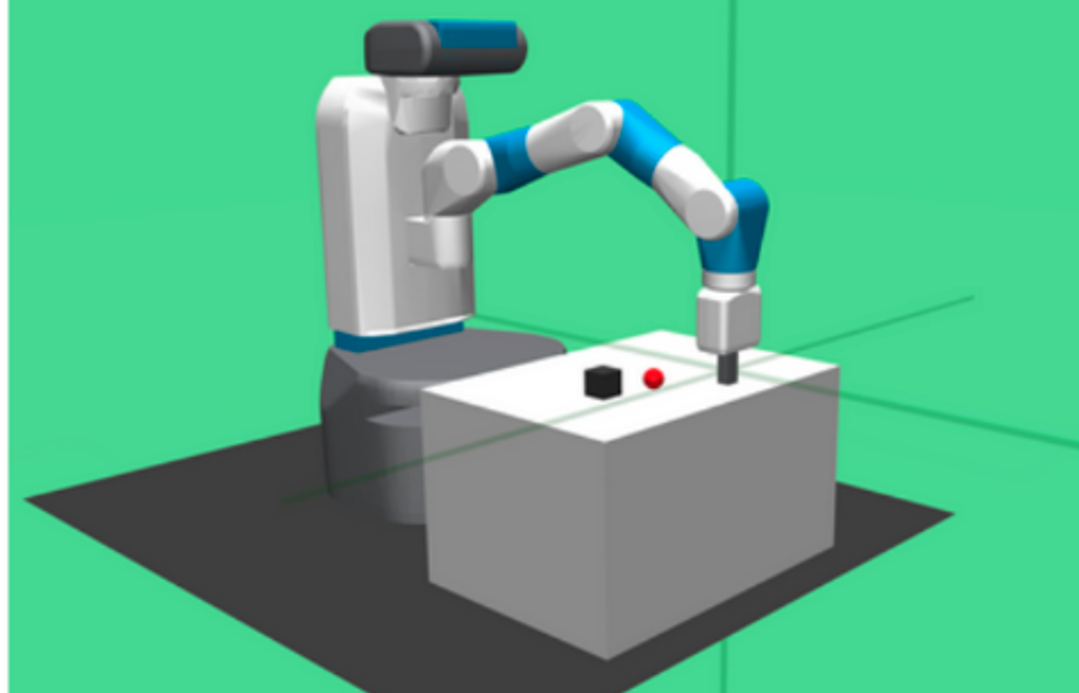
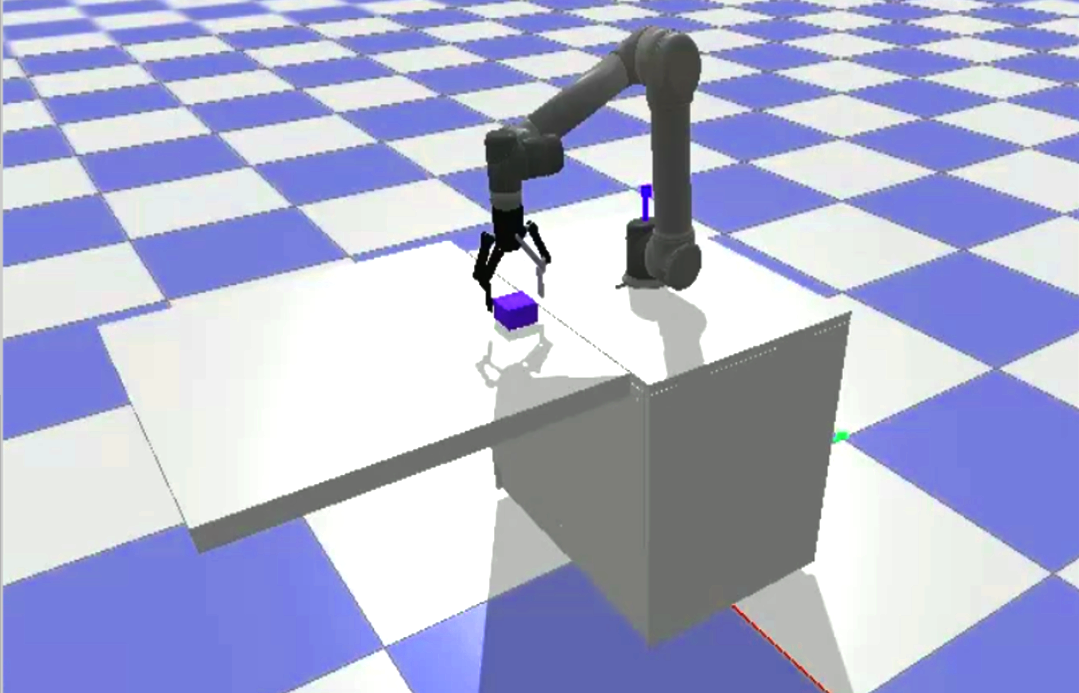
We are interested in attaining fully reactive manipulation functionalities in a closed-loop manner. Reactive systems have to continuously check if they are at risk of colliding while planners should check every configuration that the robot may attempt to use.
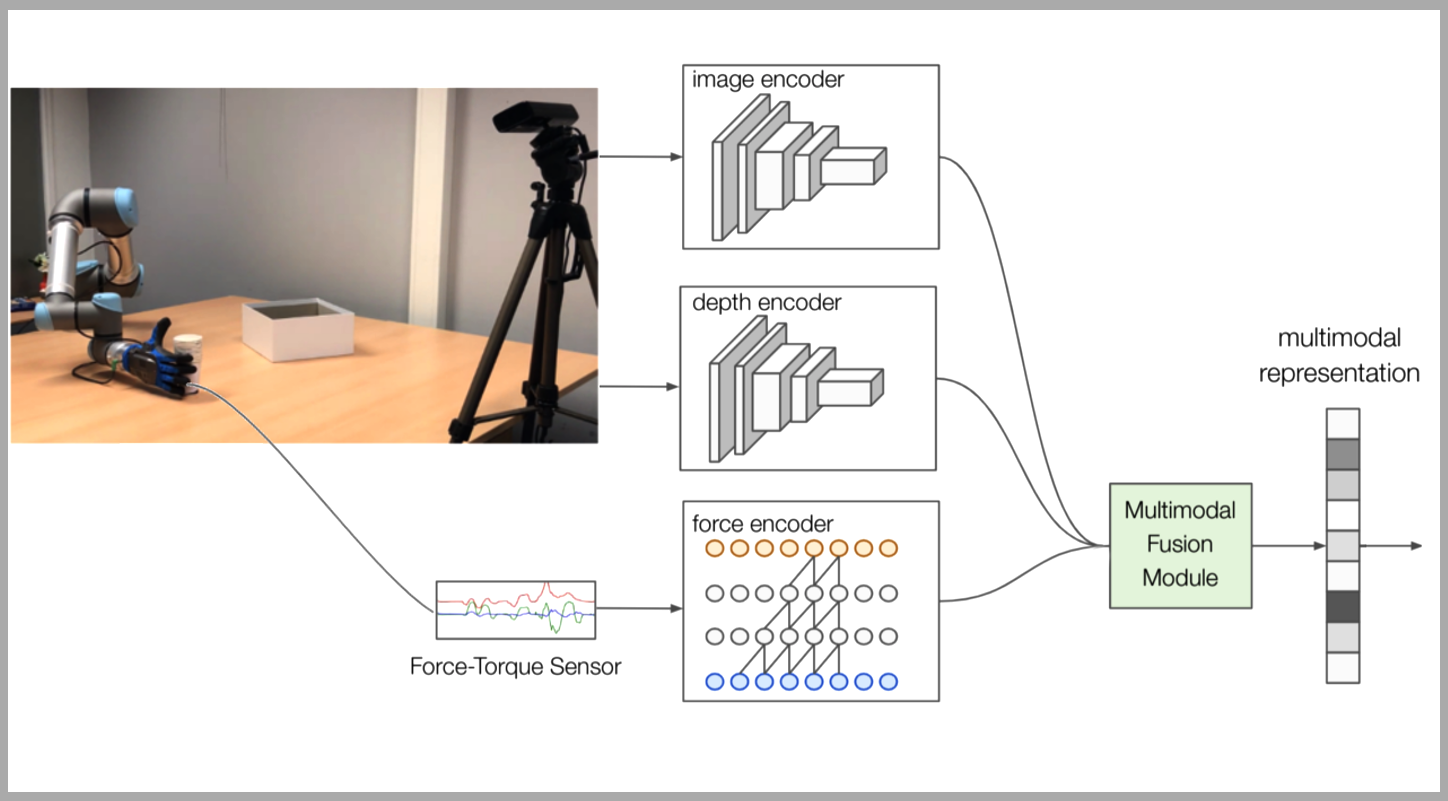
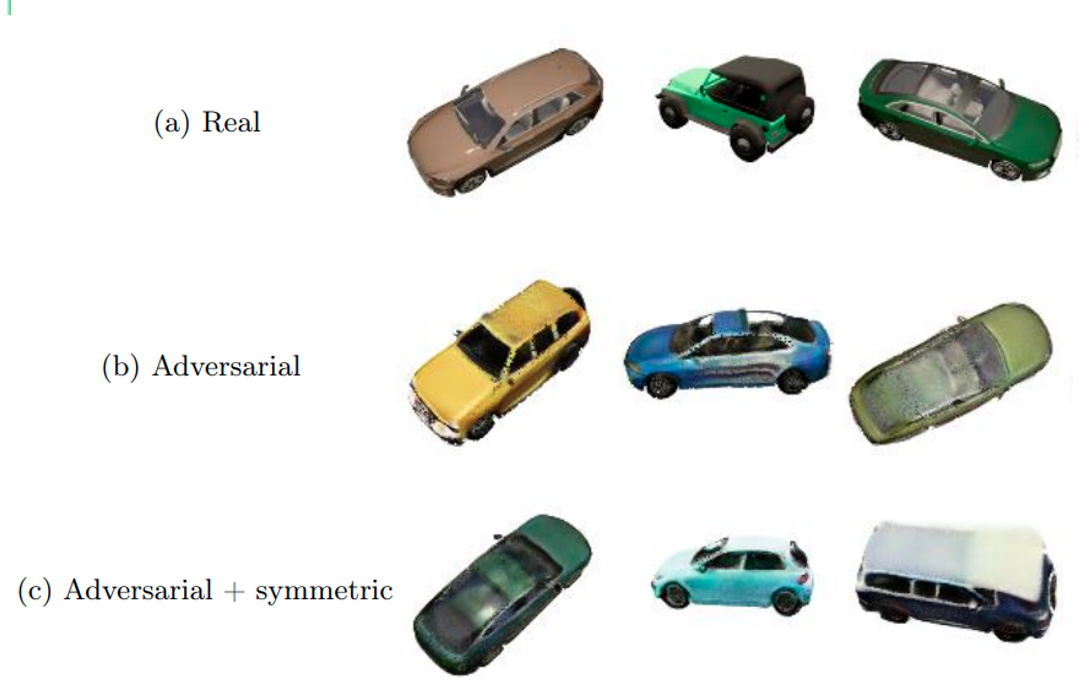
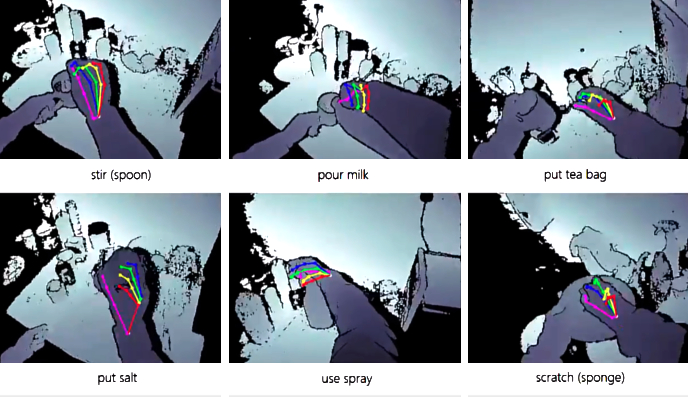
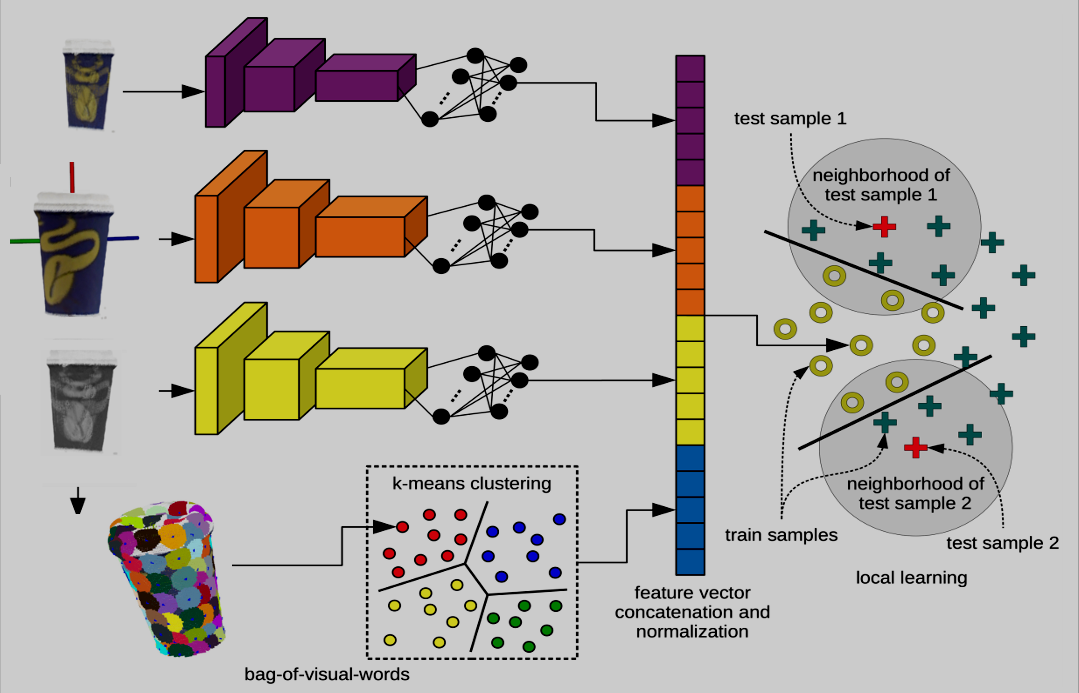
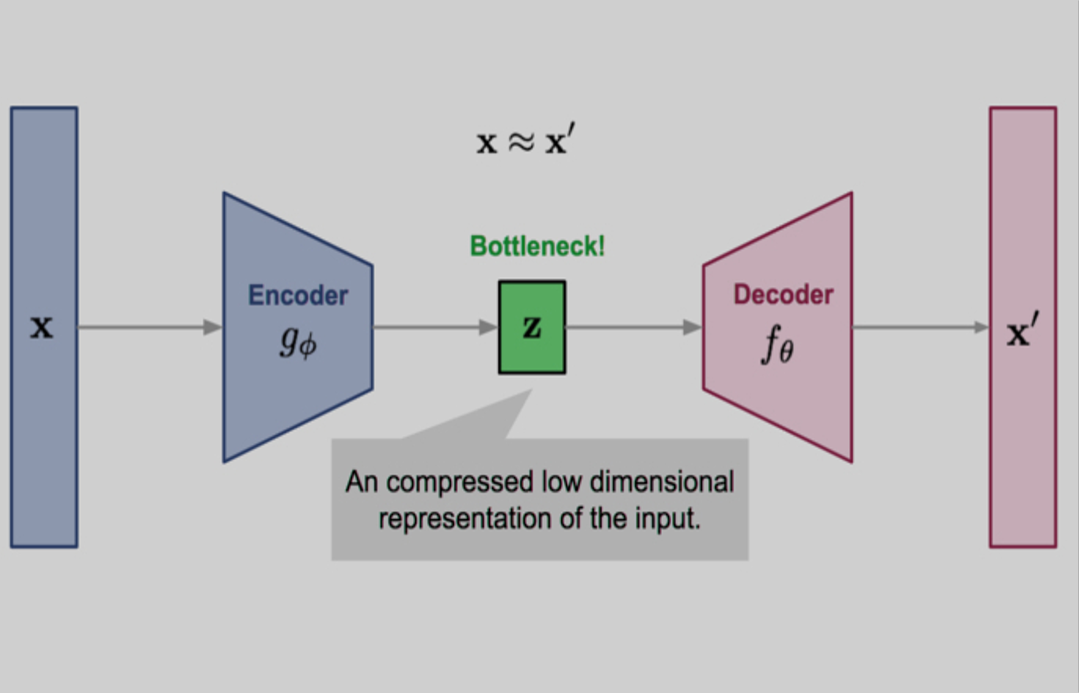
A service robot may sense the world through different modalities that may provide visual, haptic or auditory cues about the environment. In this vein, we are interested in exploiting multimodality for learning better representations to improve robot's performance.
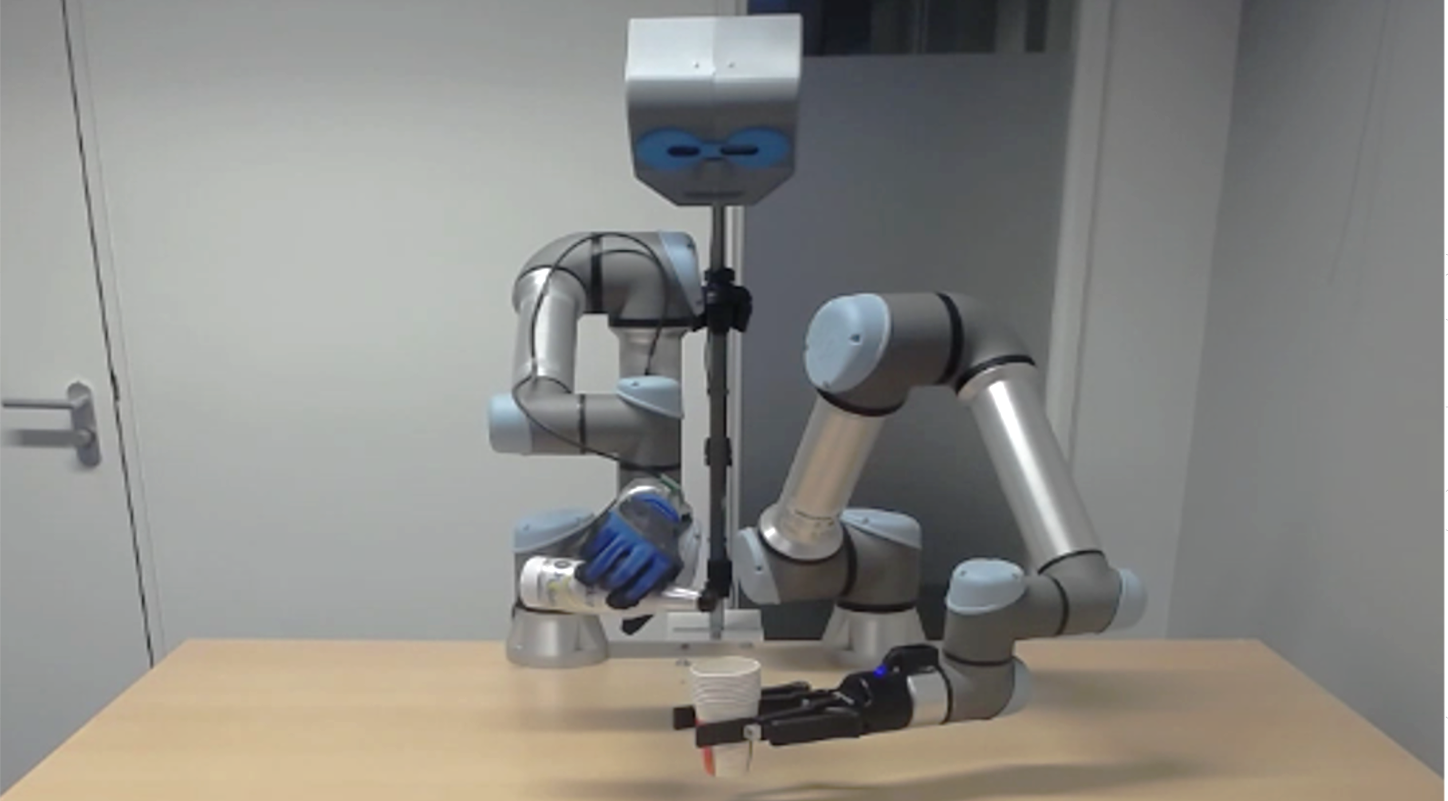
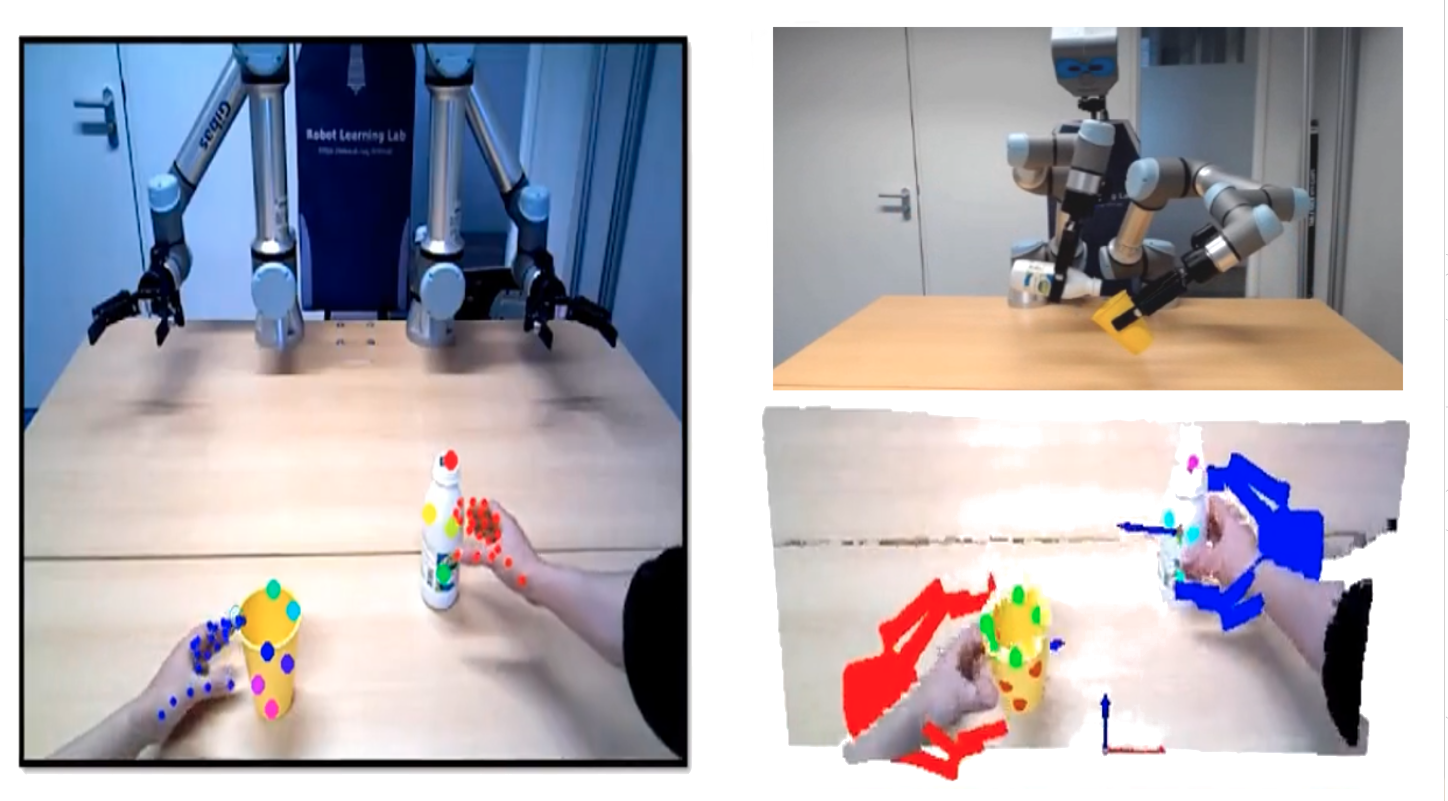
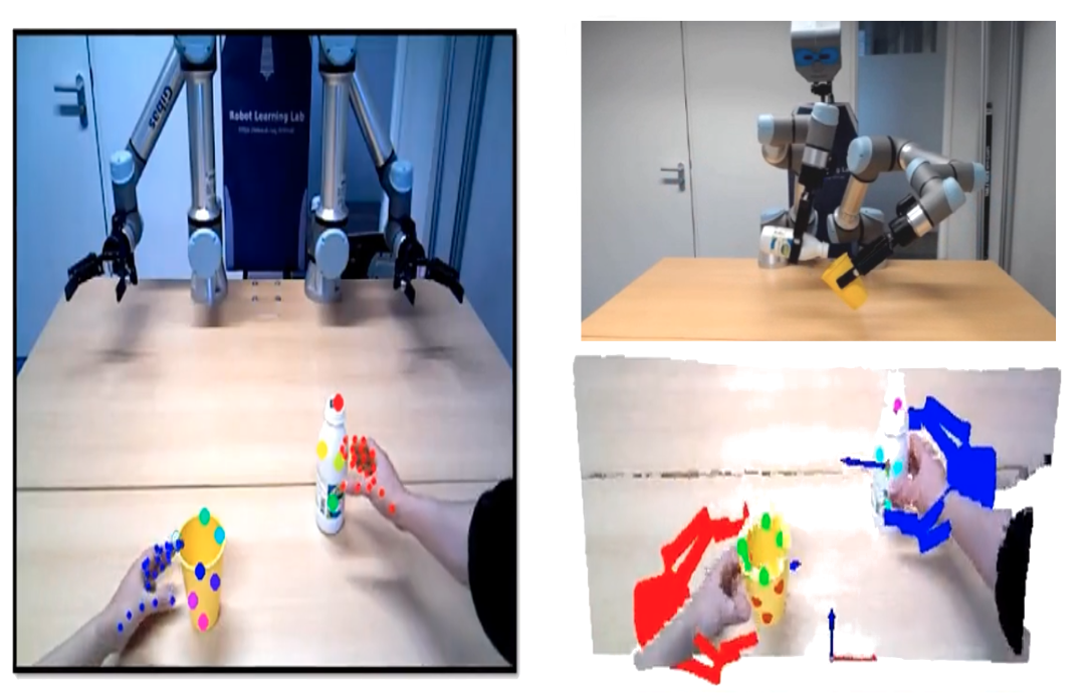
A dual-arm robot has very good manipulability and maneuverability which is necessary to accomplish a set of everyday tasks (dishwashing, hammering). We are interested in efficient imitation learning, collabrative manipulation, and large object manipulation.





We are actively looking for students to work on several amazing projects that involve:
If you are interested in doing your PhD/Master/Bachelor thesis in one of the mentioned Research Directions, please send us an e-mail including the following information:
The motivation letter should state (½ - 1 page):
We will try to get back to you within a week. The primary qualification is interest in doing research, and if you have that, we encourage you to apply even if you have limited experience with AI. We strive to be a diverse and inclusive group that is open to students from all backgrounds.
Good self-funded PhD, Master, and intern will be considered on a case by case basis. If you are interested in doing your PhD at Interactive Robot Learning Lab and you have funded from your Government (e.g., China Scholarship Council (CSC) scholarship), we can consider your application. Please contact hamidreza.kasaei@rug.nl
Prof. Hamidreza Kasaei
Artificial Intelligence Department,
University of Groningen,
Bernoulliborg building,
Nijenborgh 9 9747 AG Groningen,
The Netherlands.
Office: 340
Tel: +31-50-363-33926
E-mail: hamidreza.kasaei@rug.nl
Prof. Hamidreza Kasaei (Associate Professor)